我在写文章的时候通常要查阅很多书籍资料,最近才发现书籍间用的并不是一套标准,所以之后我写文章都会采用一套标准保证,前后文统一,避免歧义。
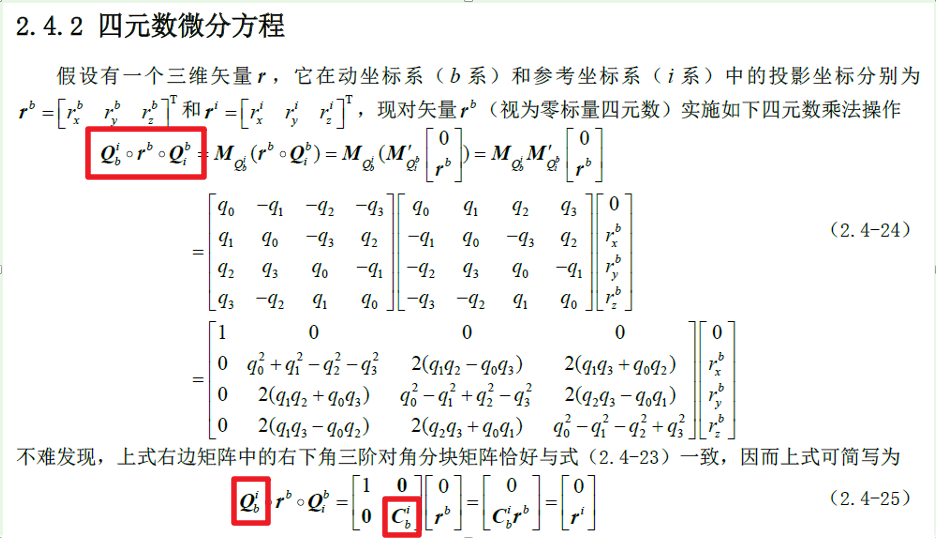
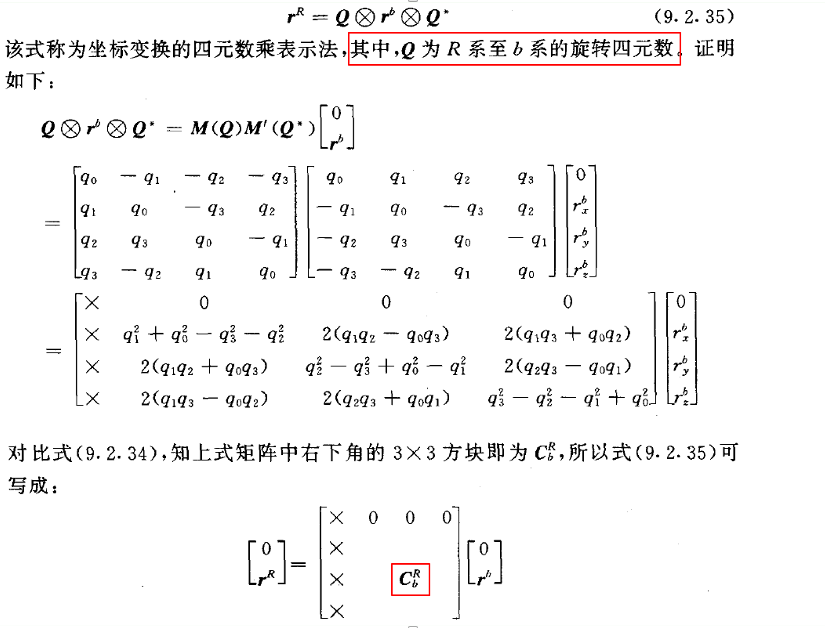
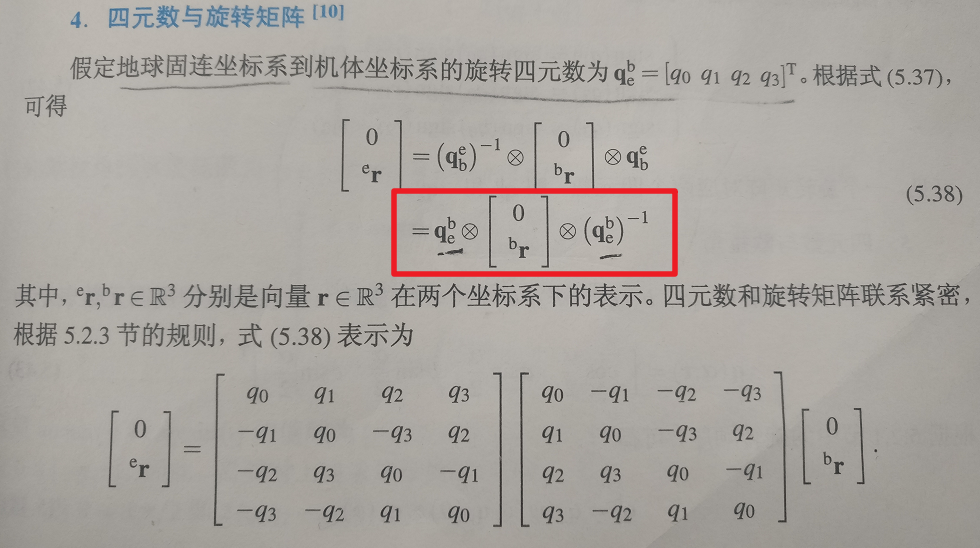
使用国内常用的标准,来定义旋转矩阵和四元数的上下标,即:
使用这套标准,有等价旋转:
所以,通过公式进行四元数转旋转矩阵有:
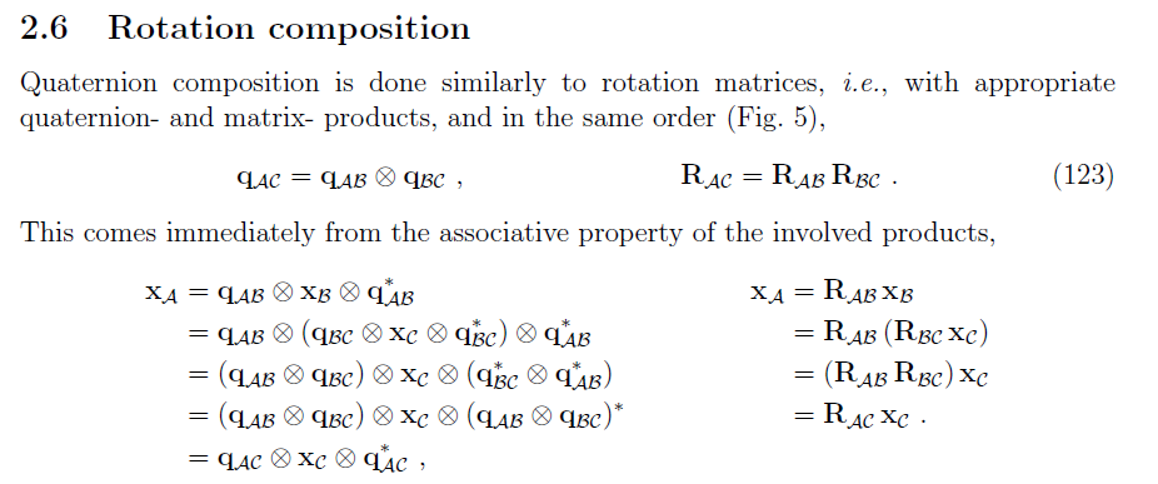
所以,旋转的操作,可以使用链式规则:
以后将使用这套规则作为文章的标准,易于理解。
使用这套国内标准的参考书有:
严恭敏老师的《捷联惯导算法与组合导航原理讲义》
秦永元老师的《惯性导航》
使用国外常用的标准的参考书有:
全权老师的《多旋翼飞行器设计与控制》
全权老师的参考文献《Quaternion kinematics for the error-state Kalman filter》
有等价旋转:
链式规则为:


