上一篇文章我们介绍了欧拉角速度与机体角速度的关系,但是姿态除了欧拉角形式,还有我们最喜欢的旋转矩阵形式,让我们来分析一下基于旋转矩阵模型:
为什么旋转矩阵的模型是这种形式?
假设地理系(e)中有一个固定的向量 r, 且机体系(b) 相对于 e 系转动的角速度为 web ,则固定矢量 r 在两坐标系下投影的转换关系(即坐标变换),为:
两边同时微分,得:
(Q1:这里是对谁微分?)
因为 r 是 e 系中的固定矢量,所以:
由于 b 系相对于 e 系的角速度为:
则在b 系上观察r的角速度应为:
并且已知:
即:
由于上式对于任意 e 系固定矢量 r 都成立,任选三个不共面的非零矢量 r1 、r2 和 r3 ,则有:
显然矩阵[r1b r2b r3b]可逆,所以必定有:
即:
这就是旋转矩阵模型的微分方程,这个公式表示了机体角速度与姿态导数之间的关系。(Q2:从这个微分方程判断,旋转矩阵能否测量全姿态?)
其中:
简单给出旋转矩阵模型的递推计算公式:
[tm-1,tm]时间段的角增量为:
记模值为:
同样用这个微分方程可以通过迭代更新得到飞机当前的姿态,不过显然这个公式过于复杂所以不常用。
补充:角速度与线速度的关系
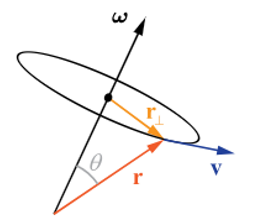
在三维空间中, 圆周运动所在的平面可以任意选取, 我们可以将角速度拓展成一个矢量 ω, 其方向垂直于该平面并由右手定则 确定. 令坐标系的原点在圆周运动的轴上, 用位矢 r 表示点 P 的位置, 则圆周运动的半径为 r⊥=rsinθ, 其中 θ 是 r 与 ω 的夹角. 所以圆周运动速度的大小为v=ωrsinθ. 根据矢量叉乘的几何定义
所以:
Q1:两边都是t的函数,两边对t微分,四则运算求导公式。
Q2:旋转矩阵可以测量全姿态,因为这个微分方程恒成立,R可以为任何旋转矩阵,W也可以为任何数。
感兴趣的小伙伴可以留意一下不同姿态表达形式的微分方程,非常有意思。


