之前我们非常详细的介绍了 APM 计算姿态误差的过程,而且还用 MATLAB 验证了它的算法,效果并不是特别好。
好奇心驱使,我想对比一下 PX4 的算法是否会有不一样的结果呢?毕竟是江湖的两大门派那就比一下。
结果一看,PX4 竟然更新了它的姿态算法,跟以前完全不一样的了。
好在给出了参考文献,我看了一下论文 ,还好基本思路没什么大变化。
1.先对齐z轴求得一个「倾斜误差」。
2.「总误差」—「倾斜误差」得到「旋转误差」。
3.对这个真实的旋转误差z做一些限制,得到一个「虚拟旋转误差」。
4.「虚拟旋转误差」加「倾斜误差」得到「虚拟总误差」
这个「虚拟总误差」就是直接传递给控制器的误差啦,控制器就通过这个值来进行控制。
其实这个过程跟 APM 是基本一致的,就是最后合成新旋转的方法, APM 因为直接抛弃「倾斜误差」的 z 轴分量,有点没有道理。PX4 的处理方法就更加合理,直接还原成「虚拟总误差」很好理解,整个过程就相当于减去了一部分yaw。
分析到这,我们已经非常熟悉这套思路了,所有知识点,之前的文章都有画过重点,很明显这是道送分题。
是不是在脑海里已经有了算法的过程呢?(没有的话,就该去把我之前的文章都点赞了,哈哈)
唯一一个最困扰的问题是:

论文和程序,在这个部分看起来是相反的,这个问题困扰了我很久。论文推了很多遍,代码也推了很多遍,甚至MATLAB仿真也跑了很多遍,只能得出程序没错,论文也没错,就是不知道为什么是反过来的!
后来就在我放弃的时候,我想反正我对姿态控制这么熟悉了,不看他的代码,如果我来做我会怎么做?
问题一下就迎刃而解了,主要的知识点我在[飞控]向量叉乘究竟是个什么样的旋转?中介绍过了。
我再来详细介绍一下整个计算过程:
当前姿态:cur 目标姿态:tar z轴对齐的中间状态:half
1.z 轴向量叉乘,得到对齐 z 轴的旋转,注意转轴还是N系
2.转轴转换到 cur 系 (这一步和APM是一模一样的哟)
3.计算地理系下的倾斜旋转(论文里写的其实是这一步)
4.计算旋转误差
5.使用固定系数yaw_w 限制 旋转误差
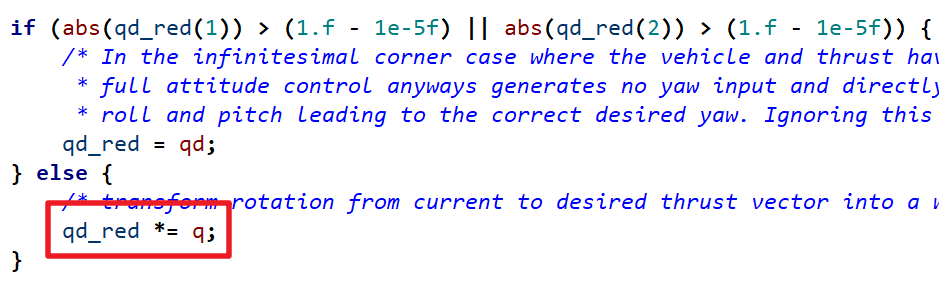
可以看到程序里是把第 4 步合第 5 步合起来写了,才有看起来反过来的感觉,很有迷惑。
除了这个困惑,其他的部分我们就非常熟悉了,总结一下:
1.在倾转分离后,PX4 采用了 「衰减」系数的形式来限制「倾斜误差」
2.使用四元数乘法还原「虚拟总误差」,一定可以对其 z 轴。
3.不知道为什么新算法采用固定的「衰减」系数,之前是根据当前的 roll 和 pitch 计算变化的系数
至此,能想像到这个算法的结果,当前姿态可以和期望姿态 z 轴重合,偏航会被限制,导致 x 轴 ,y 轴还有一定的误差。
ok,今天就讲这么多,下期我会使用 MATLAB 看看这个算法的直观效果,我是zing,一个有趣的算法工程师,我们下期见。
相关阅读:
[飞控]向量叉乘究竟是个什么样的旋转?
[飞控]姿态误差(四)-APM如何计算姿态误差
[飞控]倾转分离(一)-APM的倾转分离竟然没有效果?
ps:为了方便感兴趣的朋友,给出这部分代码的注释,方便对照
1 | MulticopterAttitudeControl::control_attitude() |
关注公众号回复【倾转分离】获得PX4的参考论文。


