刚体运动学和刚体动力学,我以前也搞不清楚,但是最近全权老师的实验课,给了我很棒的解释。
刚体运动学模型研究的是与力无关的过程,只研究位置、速度、姿态、角速度等参量,常以质点为模型。
例如路程的计算公式:x=vt
刚体动力学模型就是要研究物理的受力,物体受力后会有什么变化:
例如:F=ma
所以,之前的欧拉方程描述的是机体角速度和角加速度的关系,属于动力学模型。
运动学模型,对于多旋翼来说主要关心的就是机体角速度与姿态变化率的关系。
为什么呢?因为,我们传感器只能测量机体角速度,但是我们控制需要知道姿态变化率。
如果有了机体角速度与姿态变化率的关系,我们就可以通过传感器数据得到姿态。
我们之前反复提过,姿态有很多种表达,所以你在全权老师的书上也会看到不同形式的刚体运动学模型。今天就简单介绍一下基于欧拉角的运动学模型:
显然第一个公式非常位置的微分=速度
第二个公式,让我们考虑飞机从A状态转动到C状态的过程:
这个过程如果用机体角速度描述:
但是这个过程,如果用姿态变化率描述是什么结果呢?
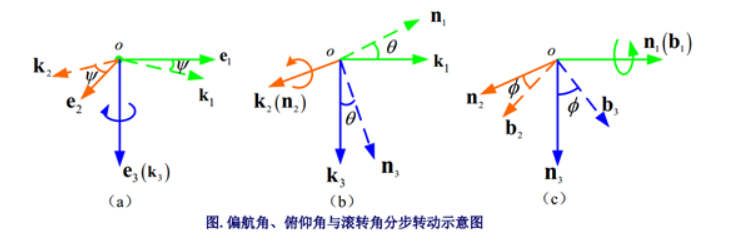
假设从地理坐标系到机体坐标系三次转动顺序为
第一次旋转是yaw,绕z轴旋转,这个过程的欧拉角速度为:
然后进行第二次旋转是pitch,绕y轴旋转,这个过程的欧拉角速度为:
最后,第三次旋转是roll,绕x轴旋转,这个过程的欧拉角速度为:
仔细回想一下这个过程,你站在C的角度上看,yaw的欧拉角速度是经过了两次旋转后你才看见的,而pitch的欧拉角速度是经过一次旋转才被你看见的,只有roll 的欧拉角速度是被你直接观察到的。
所以,机体坐标系相对于地理坐标系的角速率向量可以表示为:
其中:
所以,姿态变化率与机体角速度:
对矩阵求逆,可得:
令:
姿态为:
姿态变化率为:
即:
一阶差分方法进行近似离散化:
其中:
为机载 MEMS 陀螺仪实时输出的机体坐标系下的三轴角速率,Ts 为采样周期。只需给定三个姿态角初值,就可通过式递推计算得到 k 时刻的姿态角。
(ps:可以看到刚体的运动学模型通常用在迭代更新上,是不是突然想到卡尔曼里通常也会有模型更新的概念。)


